2021年1月,重庆大学物理学院2017级本科生秦恳、陈晨以共同第一作者在《Nano-Micro Letters》上发表了一篇题为“Magnetic Array Assisted Triboelectric Nanogenerator Sensor for Real -Time Gesture Interaction”的研究论文。《Nano-Micro Letters》是Springer出版的国际性、跨学科期刊,2020年被中科院划分为一区Top期刊。秦恳、陈晨两位同学在大学二年级寒假期间加入胡陈果教授课题组进行学习,在胡陈果和蒲贤洁两位老师指导下开始本课题的研究工作。
近年来,机械手在生产生活中发挥着越来越重要作用,它可以模拟人手的活动从而代替人手从事大量高重复性,高危险性的工作,应用领域也十分广泛,包括工业、军事、医学手术以及娱乐游戏等行业。
目前操控机械手的主要方式包括键盘,触摸板和手柄,但是随着应用领域的发展,传统的人机交互已经不能满足人们的需求。应用的发展要求机械手更加灵活,便携,甚至可穿戴,在技术层面上要解决的则是精确感知每个手指的运动,这就对手指运动信号采集带来了挑战。近年来基于摩擦带电和静电感应耦合的摩擦纳米发电机(TENG)在生理信号采集、机械信号检测等方面显示了巨大的潜力与优势,并且已经被应用于能量收集和自供电机械传感。然而目前大多数基于TENG原理的角度传感器件,主要以信号振幅作为特征来表示手指每次移动的整幅。通过信号幅度来量化弯曲程度,一方面信号不稳定,因为存在太多影响幅度的因素,每次都需要单独做归一化处理。另一方面,这种量化方法不能反映手指运动的中间状态,不能实时反映手势状态。
基于此,该论文报道了一种基于摩擦纳米技术与Halbach Array结构的自供能位移传感器件(Ma-s-TS),并基于此传感器构建了一套实时的手势识别系统,用于实现人手和机械手之间的实时手势交互。其内部的多极磁阵,可将手指的屈伸牵引运动转换为传感器内部结构之间的连续接触分离。利用这些微弱机械运动,传感器可以自己产生正/负脉冲信号。通过单位时间内的脉冲计数,实现手指屈伸的角度、速度和方向的判定。此外通过结构的优化,提高了系统的耐久性、低速信号幅值和稳定性。这种直接量化方法和对可穿戴传感器的优化,为实现自然、直观、实时的人机交互提供了一种新的策略。
Ma-s-TS的器件结构如图一所示,该传感器件由定子和滑块两部分组成。定子从底部到顶部的多层结构依次是丙烯酸基板、halbach磁橡胶阵列、金属电极以及聚四氟乙烯薄膜。其中,磁橡胶的磁极分布方向相互垂直。滑块从下到上依次是金属铜和磁条,磁条的方向与底部定子中对应的磁条方向相同。图一(a)中的插图展示了基板和滑块上磁性阵列的显影照片。左侧的磁阵是为了限制磁铁的滑动,形成稳定滑动的吸引轨道,而右侧部分主要目的是通过滑动过程中磁场极性的变化,将滑动运动转换为接触/分离运动。图1(c)所示滑块的右部和在滑动过程中,定子与滑块的接触与分离状态。在此过程中,滑块的左侧部分与定子处于相互吸引状态。
Ma-s-TS的工作原理如图2所示。首先如图二(a)所示,由于不同材料之间得失电子的能力不同,当金属和聚四氟乙烯薄膜接触后,这两个材料会在接触表面形成符号相反的表面电荷。对于Part A,当在外力作用下发生分离时,金属和聚四氟乙烯下面的电极之间会形成感应电势差。如果两个电极通过负载连接在一起,为了平衡静电场,电子会通过负载从一个电极流向另一个电极。对于Part B,金属和聚四氟乙烯接触后,金属会带上正电荷。当带正电的金属在底部两个电极之间往复运动时,底部两个电极之间的电势差会发生变化。为了平衡电势差的变化,当两个电极通过负载连通时,电子会在两个电极之间来回转移。所以Part A部分会产生一系列周期性的窄脉冲,而Part B部分,在滑动周期中会产生交替的宽脉冲信号。将这个种不同的信号进行耦合,我们就可以得到代表手指弯曲/伸展的一系列正/负脉冲。为了支撑前面解释的工作原理,PartA和PartB在运动过程中开路状态下电极的电势的变化可以通过COMSOL进行了模拟描述。并且通过实际测量,得到了图2(d–f)中两个独立部分和耦合电路中检测到的真实信号。
根据上述原理,以Ma-s-TS为基础,利用LabVIEW平台构建了一套人手-机械手同步动作系统来直观地控制机械手。图三(a)显示了戴在手指上的Ma-s-TS传感器。图三(b)和(C)分别是在手指完成“弯弯弯直弯弯直直直直”过程中,产生的正/负脉冲信号,以及机械手变化相位图。这表明了机器人手指的运动与人类手指的运动实时完全/完全同步,能够实时多方向连续控制。此外,Ma-s-TS在多通道控制中也显示出良好的稳定性。当某些手指弯曲时,其他手指通常会不自觉地被驱动。无意识的运动总是会产生错误的串扰信号。Ma-s-TS得益于磁力对滑块的限制,可以有效地抑制不同通道之间的串扰。在这里,Ma-s-TS通道之间的串扰(e)与先前的关节运动摩擦电量化传感器(d)进行了比较。Ma-s-TS更稳定,因此抑制了手指链接引起的串扰,这对于实现稳定的实时手势交互非常重要。
最后,本次报道中提出了一种新型的人机自供能位移传感器,并实现了人手与机械手的交互控制。通过对转动过程中产生得正/负脉冲进行统计,可以判断手指弯曲/伸展的程度,速度和方向。此外,磁阵列辅助的滑动结构限制了滑动方向,并将滑动运动转化为接触分离,从而大大提高了稳定性,耐用性和低速信号幅度。基于这些新颖性,已经建立了实时手势交互系统。此外,该Ma-s-TS可以应用于其他类似关节的运动检测中,以实现更自然,高精度和实时的同步人机交互。
图一:Ma-s-Ts的结构
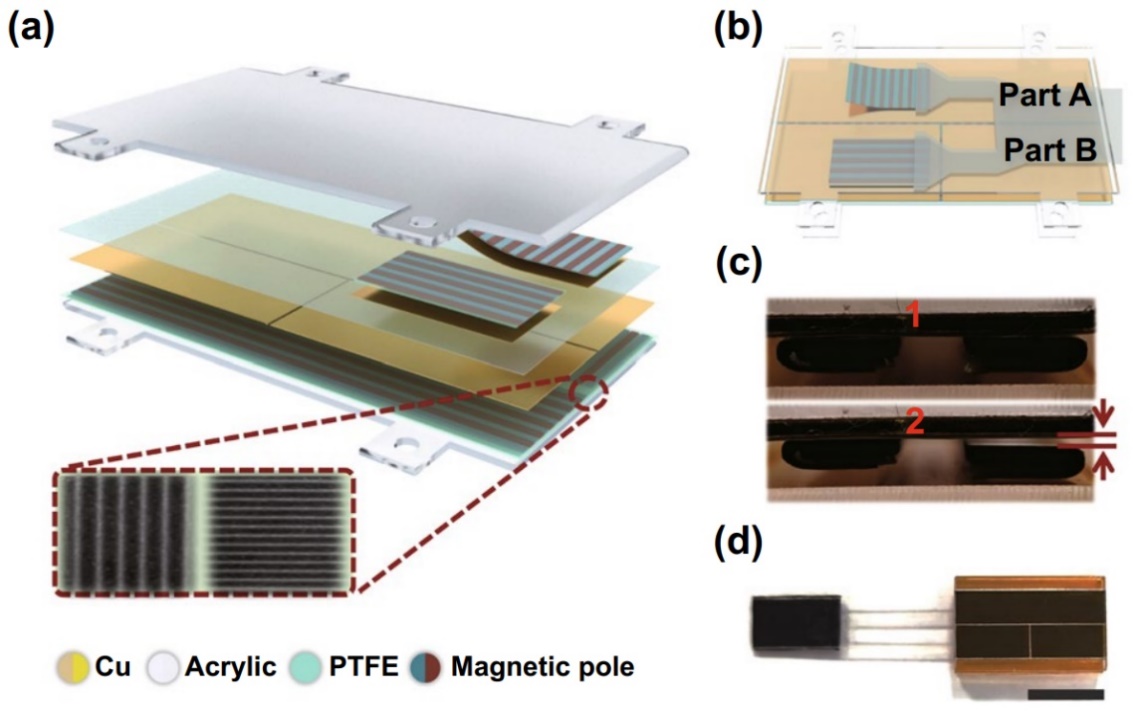
(a)Ma-s-TS的原理图和多层结构。插图:基板和滑块上磁阵列的显影照片。
(b)总体结构图。
(c)磁阵列辅助接触分离状态(顶部和底部)。
(d)制作的传感器照片(比例尺:1cm)。
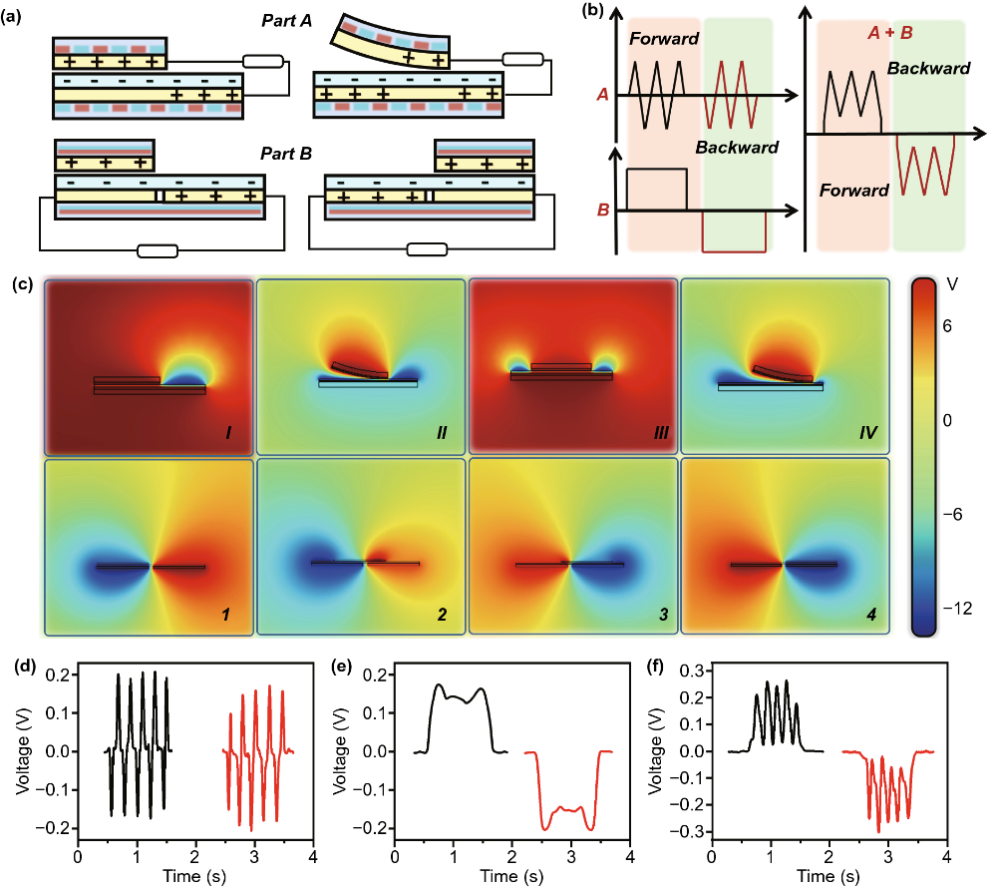
图二:Ma-s-TS的操作原理。
(a)滑动中电子转移过程的示意图。
(b)滑动过程中输出信号的示意图。
(c)有限元模拟滑动过程中开路状态下的电势分布。
(d-f)PartA、PartB、耦合后对应的实际测试输出信号。
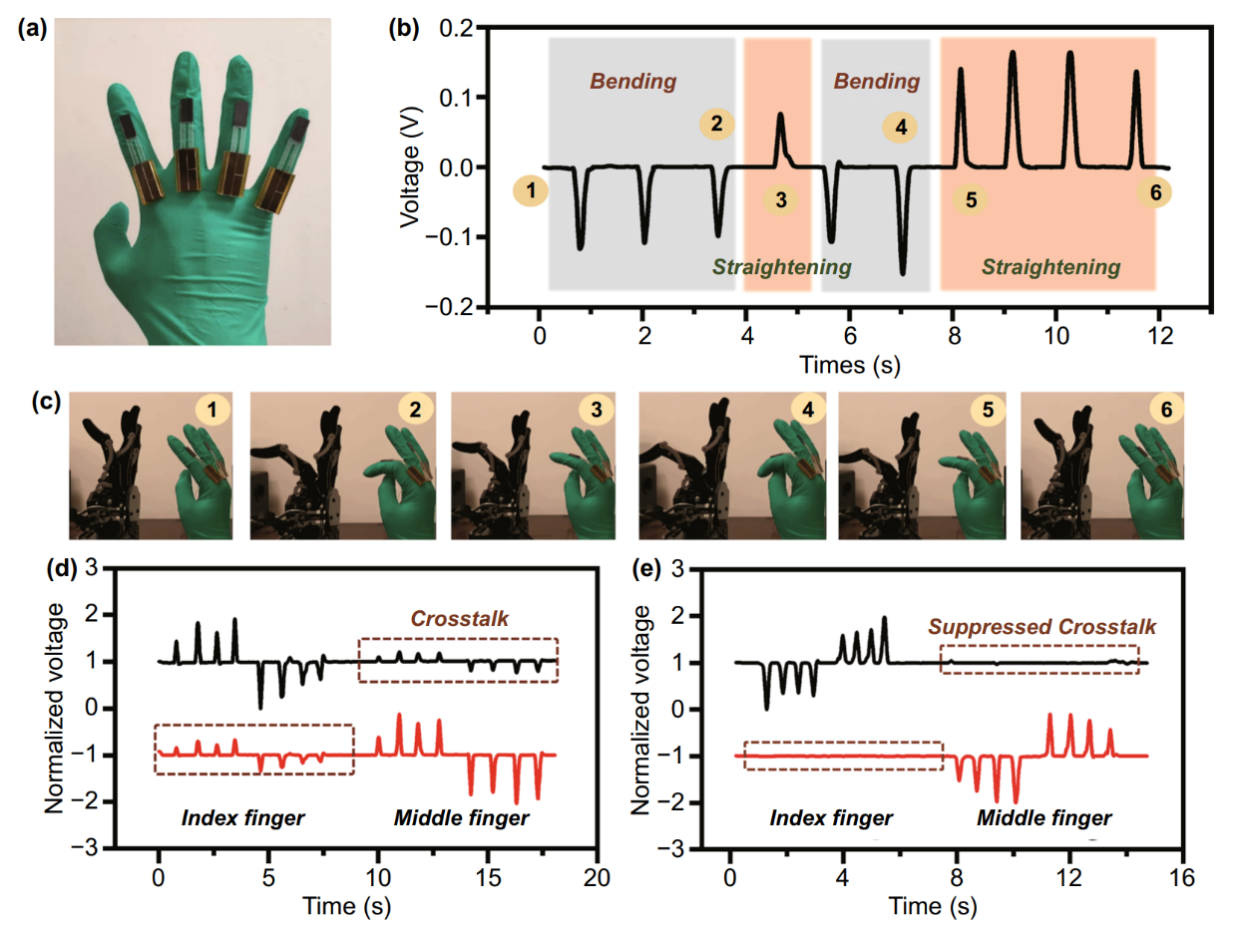
图三:实时手势交互演示
(a)戴在手指上的Ma-s-TS。
(b)正负脉冲表示手指伸直和弯曲。
(c)基于图(b)信号的机械手和人手的实时手势交互。
(d–e)与jmTQS在信道间串扰的比较(d jmTQS,e Ma-s-TS)。
文章链接:https://link.springer.com/article/10.1007%2Fs40820-020-00575-2