2021年3月,重庆大学物理学院刘雳宇课题组发表研究论文“Emergent Field-Driven Robot Swarm States” (涌现型场驱动的机器人集群态)。该论文以重庆大学为第一单位和通讯单位在Physical Review Letters上发表。文章同时被编辑推荐(Editors' Suggestion)并入选Featured in Physics,重庆大学博士生王高为第一作者,重庆大学刘雳宇教授为通讯作者。
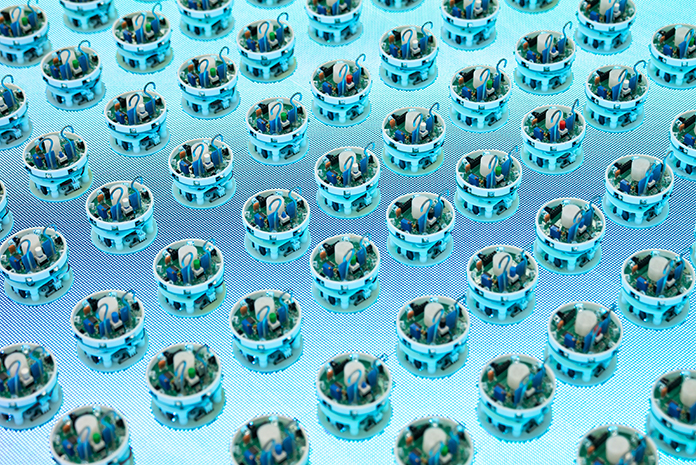
图1.环境平台上的机器人集群阵列
活性物质集群在自然界的各种尺度下广泛存在,包括菌落、细胞组织、蚁群、鱼群、羊群和鸟群等。课题组基于超大型LED屏作为可编程数字化虚拟环境平台,结合原创设计的环境耦合型机器人集群,为活性物质家族增加的一个新成员:机器人活性物质(Robotic Active Matter)。该系统攻克了传统的活性物质研究中难以解决但又十分重要的集群个体与环境相互耦合的难题,满足了活性物质个体感知环境的同时也可以改造环境的需要,且个体与环境的动态耦合特征可定义、可量化和可编程。
在该研究中,每个机器人被定义为资源场驱动的个体,它们像生物一样消耗所处位置的资源后往更高资源方向运动。被消耗的资源场具有一定速率的恢复率,机器人消耗资源后留下的阴影区域又会影响其它个体的行为,从而形成高度动态的环境耦合型活性物质系统。研究发现,当机器人集群处于持续收缩的圆形资源场中时,通过调节环境恢复率和机器人的资源消耗率等参数,机器人集群能够涌现出类似于物质相的气态、固态、液态、玻璃态和堵塞态以及这些态的动态转变过程。课题组希望通过更好地控制和理解机器人的集体行为,发现潜在的与生物学、生态学甚至社会学联系在一起的丰富且令人惊讶的集群现象。
APS(美国物理学会)《物理》杂志在其官方网站首页置顶报道了该工作https://physics.aps.org/articles/v14/38 并称赞这一新的研究可以帮助揭示生态系统中隐藏的复杂性和未探索的现象,为实验室中演示集群涌现行为提供了一条新的途径。该研究工具可以解决在实际场景中或计算机模拟中难以探索的问题,也可能会在许多受生物启发或其他因素影响的活性物质问题中被证明是非常有用的。
图2. APS Physics 首页置顶报道了此研究工作
同时,著名软物质科学家Sriram Ramaswamy 评价此研究工作“The novelty of this work lies in the clever and simple experimental realization, with control of the rates of both grazing and regrowth.” 他认为这个全新的系统为探索活性物质提供了许多潜在的方向,例如研究环境如何响应与生物群落的相互作用而经历的相变。
论文链接:https://journals.aps.org/prl/abstract/10.1103/PhysRevLett.126.108002
该研究工作得到了国家自然科学基金(No. 11974066, No. 11674043)和首都卫生发展科研专项(No. 2020-2-2072)的支持。
课题组主页:http://bmphys.cqu.edu.cn/